Eine Vielzahl entwickelter Betätigungsmechanismen wird zur Reproduktion von Tastempfindungen in haptischen Geräten eingesetzt. In diesem Artikel basiert der vorgeschlagene taktile Mikroaktuator auf mikromagnetomechanischen Systemen. Es ermöglicht eine starke Durchbiegung seiner deformierbaren aktiven Oberflächen unter hohen Magnetkräften. In solchen taktilen Anwendungen wurde die Verwendung eines hoch mechanisch widerstandsfähigen elastomeren Materials als Alternative zu klassischem PDMS erfolgreich verarbeitet.
Das vorgeschlagene Modell besteht aus einer Reihe impulsgesteuerter magnetostatischer Mikroaktuatoren mit einem Abstand von 2 mm. Es erwies sich als relevante Wahl für ein Hybriddesign, bei dem Mikrotechnik- und Mikrofabrikationstechniken kombiniert werden. Dadurch können große Verformungen erreicht werden, ohne dass sich die Leistung verschlechtert der Mechanismus.
Abbildung 1 zeigt den Aufbau des untersuchten Tastgeräts.
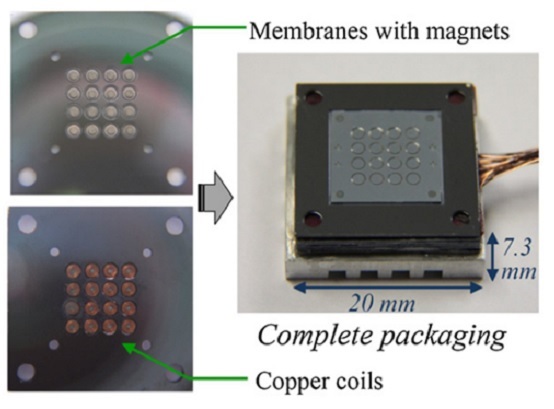
Abbildung 1 - 4 × 4-Mikroaktor-Array: Montage und Integration in die Verpackung [2].
Das in dieser Veröffentlichung vorgeschlagene magnetostatische Mikroaktuator-Array besteht aus 4 × 4 einzeln angesteuerten Mikroaktuatoren mit einer Auflösung von 2 mm. Jedes Design besteht aus zwei Teilen: einem ersten Teil, der aus einer mobilen Elastomermembran aus PDMS besteht, die auf einem Siliziumsubstrat basiert und einen Mikromagneten in der Mitte hält. Der zweite Teil hält eine feste Kupferspule unter dem Magneten und umgibt einen ferromagnetischen Kern. Die Gesamtabmessungen sind in Tabelle 1 aufgeführt. ![Abbildung 2: a). Querschnittsansicht des taktilen Mikroaktuators [1] b) 3D-CAD-Entwurf](/ckfinder/userfiles/images/Cross-sectional-view-of-the-tactile-micro-actuator-%5B1%5D%20b%29-3D-CAD-design.jpg)
Abbildung 2 - a). Querschnittsansicht des taktilen Mikroaktuators [1] b) 3D-CAD-Entwurf.
Tabelle 1 : Komponentenabmessungen
| Komponente | Abmessungen (mm) | ||||
| Spule | Innendurchmesser | Außendurchmesser | Höhe | ||
| 0,5 | 1.2 | 1.8 | |||
| PDMS-Membran | Länge | Höhe | Breite | ||
| 2 | 2 | 0,8 | |||
| Substrat | Äußerer Teil | Länge | Höhe | Breite | |
| 2 | 2 | 0,8 | |||
| Innenteil | Innendurchmesser | Außendurchmesser | Dicke | ||
| 1.2 | 1.7 | 0,8 | |||
| Magnet | Durchmesser | Höhe | |||
| 1 | 0,5 | ||||
| Ader | Durchmesser | Höhe | |||
| 0,5 | 1.8 | ||||
| Spalt zwischen Spule und Magnet | 0,4 | ||||
Das Hauptziel der Studie ist die Berechnung und Visualisierung der PDMS-Membranablenkung, die durch die magnetischen Betätigungskräfte der Coil-Magnet-Wechselwirkung erzeugt wird. Eine FEM-Simulation wurde durchgeführt, indem das magnetostatische Modul von EMS an die Strukturanalyse gekoppelt wurde.
Die folgenden Schritte definieren den erforderlichen Simulationsaufbau:| Teil | Material | Dichte (Kg/ | Magnetische Permeabilität | Elektrische Leitfähigkeit (S/m) | Elastizitätsmodul (Pa) | Poissons Verhältnis | Magnetisierung Koerzitivfeldstärke (A/m) Remanenz (T) |
| Spule | Kupfer (Cu) | 8900 | 0,99 | 5,7 E + 07 | Nicht erforderlich | Nicht benötigt | |
| Membran | PDMS | 1030 | 1,38 | 0 | 2E + 6 | 0,49 | |
| Substrat | Silizium (Si) | 2329 | 1 | 0 | 159E + 9 | 0,27 | |
| Ader | Permalloy (NiFe) | Nicht benötigt | 82000 | 0 | Nicht erforderlich | ||
| Magnet | Neodym-Eisen-Bor (NdFeB) | 1,175 | 0 | 954929 1.4 | |||
Die Induktorspule ist als Wickelspule gemäß Tabelle 3 definiert:
| Anzahl der Züge | Drahtdurchmesser (mm). | Effektivstromstärke (A) | |
| Gewickelte Spule-1 | 48 | 0,15 | 0,8 |
An den vier lateralen Seiten der PDMS-Membran werden feste Randbedingungen angelegt, wie in Abbildung 3 dargestellt:
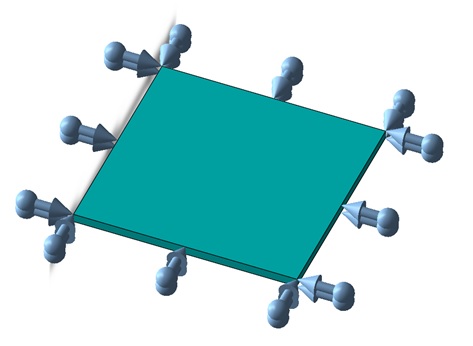
Bild 3: Angewandte mechanische Randbedingungen.
Das Netz des verformten Teils (Elastomermembran) sollte verfeinert werden, um eine genaue Berechnung der Magnetkraft zu erhalten und um genügend Elemente für die Spannungs- und Verformungsberechnung zu gewährleisten. Die folgende Abbildung zeigt das gesamte Netzmodell mit einer Feinmaschensteuerung, die auf die oberen Teile angewendet wird.
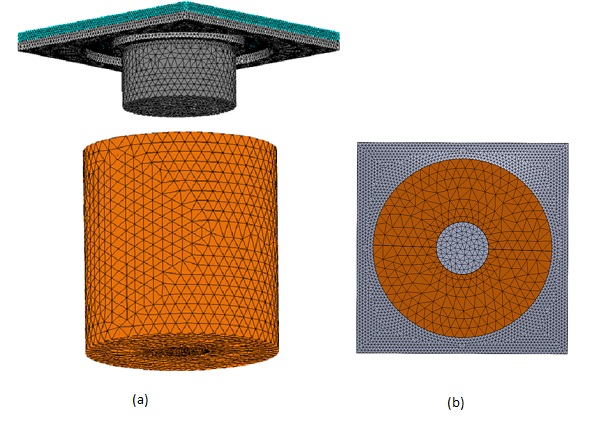
Abbildung 4 - a). Das ganze vermaschte Modell b). Untersicht.
Eine Multiphysik-Simulation wurde unter Verwendung des EMS-Tools durchgeführt, mit dem die Magnetkraft bestimmt werden konnte, die sich aus der Wechselwirkung zwischen dem Magneten und der Spule ergibt. Die erhaltenen Ergebnisse sind in den folgenden Abbildungen gezeigt.
Die Verteilung des Magnetflusses für Kern und Magnetteil ist in Abbildung 5 dargestellt.
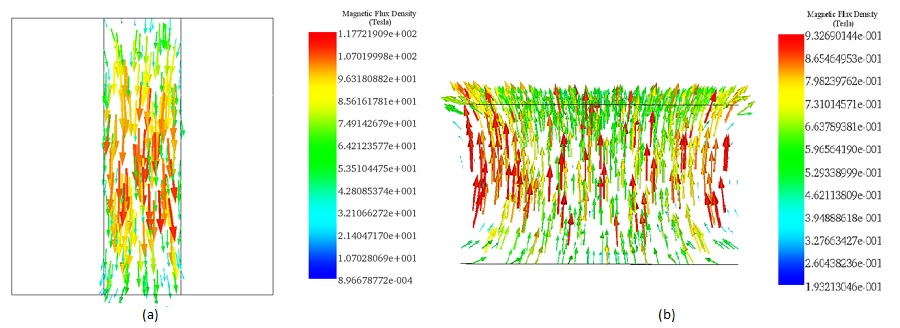
Abbildung 5 - Magnetflussverteilung über a). der Kern und b). die Magnetteile.
Tabelle 4: EMS-Ergebnistabelle der virtuellen Arbeit, die die Wechselwirkung zwischen Spule und Magnet definiert.
| Fx-Achse (N) | Fy-Achse (N) | Fz-Achse (N) | |
| Virtuelle Arbeit - 1 | 2.7957e-005 | 7.9450e-005 | 5.1816e-003 |
Die Korrelation zwischen den Referenz- [1] und EMS-Ergebnissen scheint durch die erhaltenen Ergebnisse der magnetischen Betätigungskraft und des maximalen Auslenkungswerts der PDMS-Membran sehr gut zu sein. Tabelle 5 zeigt diese Vereinbarung:
Tabelle 5: Vergleichstabelle zwischen den Ergebnissen von EMS und Referenz [1].
| Ergebnisse | EMS | Referenz [1] |
| Betätigungskraft (mN) | 5.18 | 5 |
| Maximale Auslenkung (µm) | 108.9 | 108,6 |
Unter dem Einfluss der darauf einwirkenden Magnetkräfte biegt sich die Membran mit einer signifikanten Auslenkungsgröße in Richtung ihres Zentrums, wie in Abbildung 6 gezeigt.
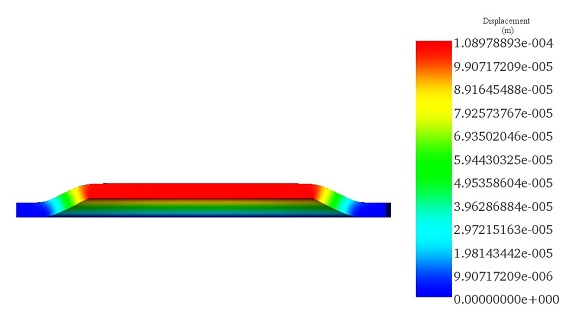
Abbildung 6 - Schnittdarstellung der resultierenden Verschiebung der Membran. 
In diesem Artikel werden die Fortschritte bei der magnetostatischen Mikroaktivierung und der polymerbasierten MEMS-Verarbeitung untersucht. Die Charakterisierung derartiger taktiler Anzeigeaktoren zeigte eine gute Leistung und Zufriedenheit hinsichtlich der erzeugten Kräfte und Auslenkungen in kleinen Maßstäben im Hinblick auf einen geringen Energieverbrauch.
Die erhaltenen EMS-Ergebnisse bestätigen die Fähigkeit der magnetostatischen Mikromechanismen, unabhängig von der Betätigungsfrequenz das taktile Empfinden in haptischen Geräten zu befriedigen.
[1].Streque, Jeremy, et al. "New magnetic microactuator design based on PDMS elastomer and MEMS technologies for tactile display." IEEE Transactions on Haptics 3.2 (2010): 88-97.
[2]. Streque, J., et al. "Pulse-driven magnetostatic micro-actuator array based on ultrasoft elastomeric membranes for active surface applications." Journal of Micromechanics and Microengineering 22.9 (2012): 095020.
| Share on |

