MEMS-basierte Mikrogreifer bieten eine hervorragende Flexibilität und Anpassungsfähigkeit in Miniaturisierungsgeräten für verschiedene technische Anwendungen wie Mikromanipulationen, Mikrobaugruppen usw.
Die ansteuernden integrierten Mikrogreifer sind Gegenstand mehrerer multiphysikalischer Analysen. Mit solchen Analysen wird die mechanische Manipulation der Mikrogreifer bei geringem Stromverbrauch untersucht.
Der untersuchte Mikrogreifer (Abbildung 1) besteht aus zwei Greifspitzen, die an zwei U-förmigen Antrieben befestigt sind. Das Gerät dient zum Halten von Mikroobjekten, indem seine beiden Arme unter angelegter Gleichspannung abgelenkt werden.
![Der untersuchte Mikrogreifer hält einen Ball zwischen seine beiden Spitzen [1]](/ckfinder/userfiles/images/The-studied-micro-gripper-holdding-a-ball-between-its-both-tips%5B1%5D.jpg)
Abbildung 1 - Der untersuchte Mikrogreifer hält eine Kugel zwischen seinen beiden Spitzen [1]
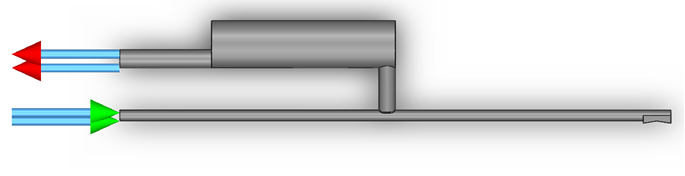
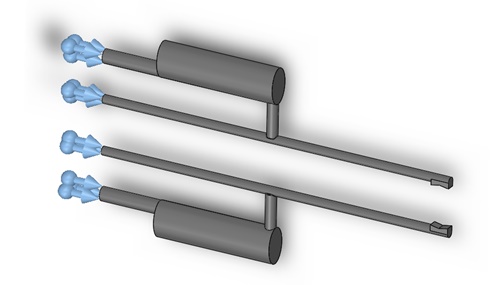
Die Leistung des Mikrogreifers wird mit dem EMS-Finite-Elemente-Tool modelliert, um seine Verschiebung und Temperaturverteilung abzuschätzen. Die schematische Darstellung und das 3D-Modell sind in Abbildung 2 dargestellt.
![Schematische Darstellung des Mikrogreifers [1] a). 3D-Modell b).](/ckfinder/userfiles/images/Schematic-illustration-of-the-micro-gripper-%5B1%5D-a%29.-3D-Model-b%29..jpg)
Abbildung 2 - Schematische Darstellung des Mikrogreifers [1] a). 3D-Modell b).
Tabelle 1 - Modellabmessungen [1]
| Parameter | Symbol | Wert (mm) |
| Länge des heißen Arms Breite des heißen Arms Dicke des heißen Arms | | 4.5 0,21 0,21 |
| Länge des Zwischenarms Breite des Zwischenarms Dicke des Zwischenarms | 0,8 0,27 0,25 | |
| Länge des kalten Arms Breite des kalten Arms Dicke des kalten Arms | 3 0.9 0,63 | |
| Länge des Biegearms Breite des Biegearms Dicke des Biegearms | 1.5 0,35 0,3 | |
| Gesamtlänge | 9 | |
| Anfangslücke | 1 |
Das Magnetostatic-Modul von EMS, gekoppelt mit der thermischen und strukturellen Analyse, dient zur Vorhersage und Bewertung des thermischen und mechanischen Verhaltens des Mikrogreifers.
Der Simulationsaufbau besteht aus den folgenden Schritten:
In unserer Fallstudie werden folgende Materialeigenschaften verwendet (Tabelle 2):
| Eigentum | Dichte (Kg/ | Elektrische Leitfähigkeit (S/m) | Wärmeleitfähigkeit (W/m. K) | Wärmeausdehnungskoeffizient (/K) | Elastizitätsmodul (GPa) | Poissons Verhältnis |
| Silber-Nickel-Komposit (Ag-Ni) | 2370 | 31903 | 66,7 | 120 E-06 | 21.5 | 0,3 |
Jede verlängerte Spitze des Mikrogreifers ist als feste Spule mit einer Spannung von 1,54 V definiert, wobei die Eingangs-/Ausgangsöffnung in Abbildung 3 dargestellt ist:
Die thermischen Randbedingungen von 27 ° C gelten für beide verankerten Polster. Der Luftkörper wird bei Umgebungstemperatur mit einer thermischen Konvektion mit einem auf 10 W/m²K eingestellten Koeffizienten beaufschlagt.
Feste Randbedingungen werden auf beide Seiten der verankerten Pads angewendet, wie in Abbildung 4 dargestellt:
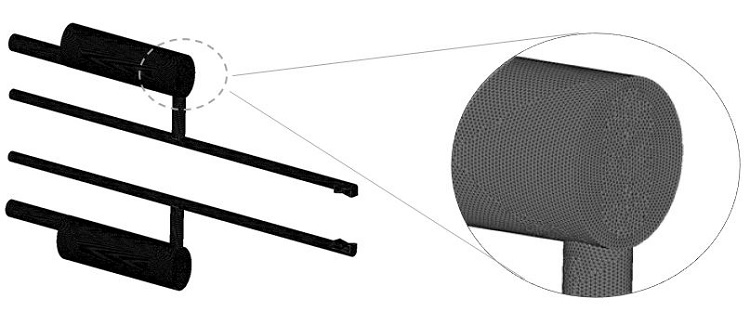
Das gesamte Modell ist in EMS mit einem fein gesteuerten Netz vernetzt (siehe Abbildung unten), um genauere Ergebnisse zu erzielen.
Die Simulation ergab die folgenden Ergebnisse. Abbildung 6 zeigt die maximale Temperaturverteilung, die am heißen Arm bei einem Eingangsstromwert um 0,26 A auftritt.
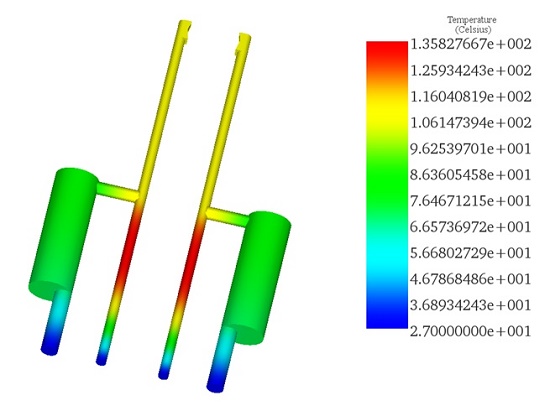
Für die mechanischen Verschiebungsergebnisse erreicht jede verlängerte Spitze eine maximale Auslenkung von 166 &mgr; m.
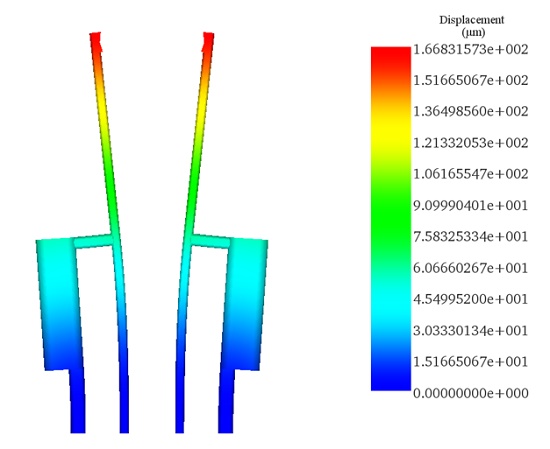
Für die gleiche angelegte Eingangsspannung zeigt Tabelle 3 den Vergleich zwischen gemessenen und simulierten Ergebnissen, die mit der Referenz [1] und dem EMS-Tool angegeben wurden.
| Ergebnisse | Simulation [1] | Messung [1] | EMS |
| Max Gesamthubraum (μ m) | 322 | 311 | 332 |
| Maximale Temperatur ( ° C) | 155 | 123 | 135 |
Die Funktionen von EMS Multiphysics gewährleisten eine genaue Simulation von elektrisch angetriebenen Mikrogeräten. Im vorliegenden Beispiel bewirkt eine höhere Temperatur, die durch den Joule-Effekt verursacht wird, eine höhere Verschiebung im Mikrogreifer.
[1]. Feng, Yao-Yun, et al. "Fabrication of an electro-thermal micro-gripper with elliptical cross-sections using silver-nickel composite ink." Sensors and Actuators A: Physical 245 (2016): 106-112.
| Share on |

